I am currently the director of [ innovative Control, Automation and Robotics Lab (iCAR) ], Mechatronics Engineering Department, Yangon Technological University, Myanmar.
1. Stability Enhancement in Admittance Control
The video is under perparation.

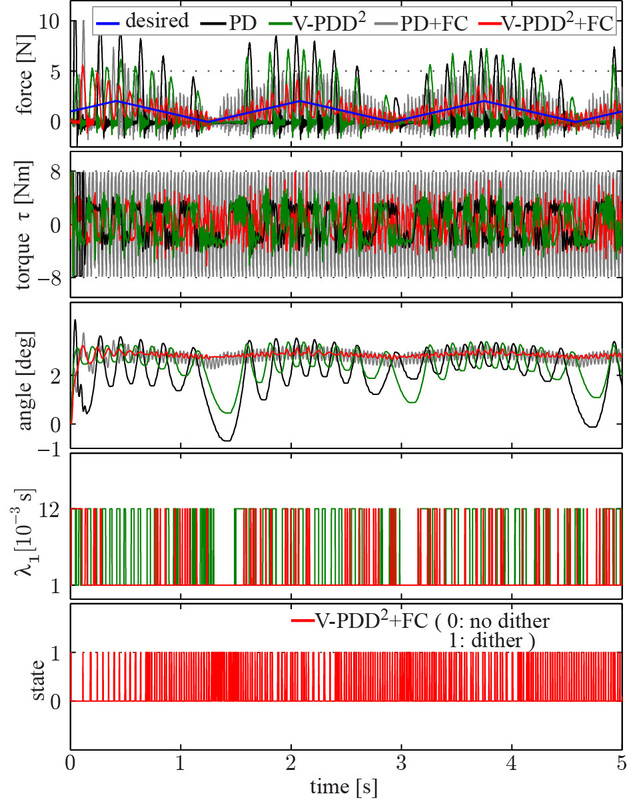
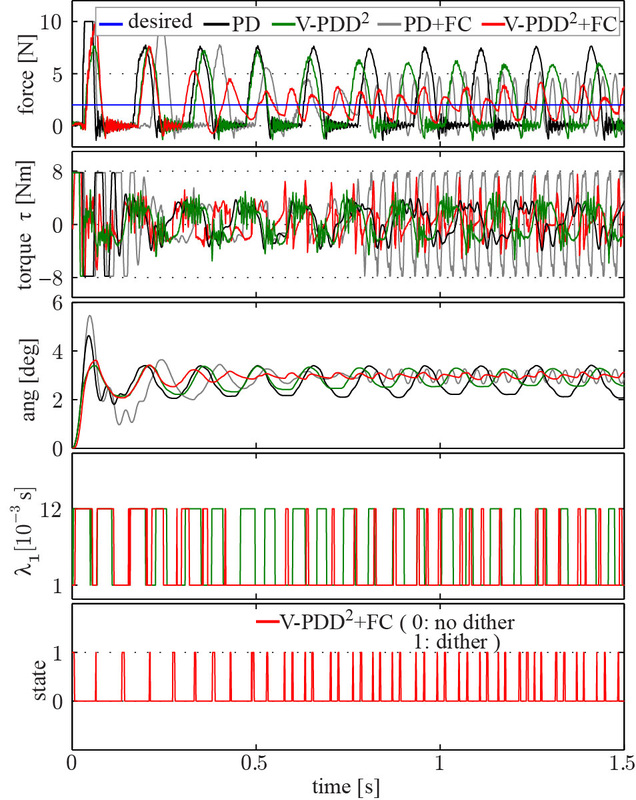
This research proposes a new position controller that is suitable for the use as the internal position servo of an admittance controller. The new position controller is characterized by four points: (a) PDD² (proportional, derivative, and second derivative) feedback, (b) dither-based friction compensation, (c) sliding-mode-based noise filtering, and (d) variable D² gain. The PDD² structure and the friction compensation are theoretically expected to contribute the stability of the admittance control by expanding the bandwidth of the internal position control. The sliding-mode-based filter is for smoothing the acceleration signals without producing a large phase lag. The variable D² gain is for reducing the effect of acceleration-measurement noise at low velocity. The proposed controller was tested with a 1- DOF device in contact with environments.
2. PDD² Position Controller for Overdamped Response and Improvement in Disturbance Rejection
The video is under perparation.
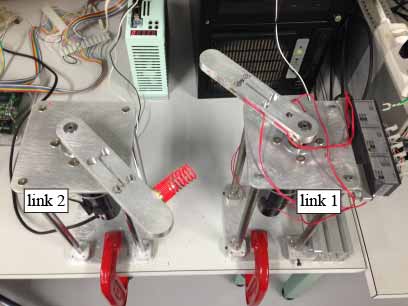
High-gain proportional-integral-derivative (PID) position control can achieve stiff position control but it involves the risk of overshoots in some cases such as discontinuous position commands and disturbances. This research presents a new position controller that achieves accurate trajectory tracking and overdamped resuming motion from large positional errors and disturbances. The proposed controller is a combination of PDD² (proportional, derivative, and second derivative) controller with nonlinear damping term, which we call (NPDD²), and the output of a friction compensator (FC). The nonlinear damping term overcomes the limited use of high damping in conventional PDD² and thus advantageous in dealing with disturbances. Accurate trajectory-tracking is achieved due to friction compensation. The validity of the proposed controller was demonstrated through experiments in realizing overdamped motion and accurate tracking simultaneously and achieving improvement in robustness to disturbances in a robotic manipulator.
3. Sliding-mode-based Noise-reduction Filter
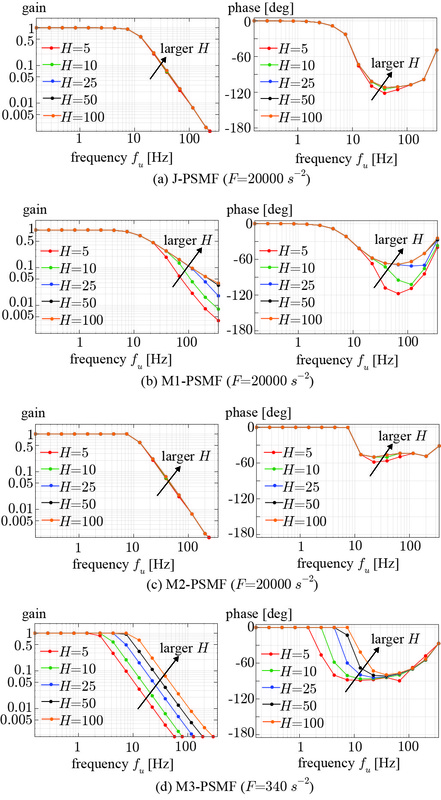
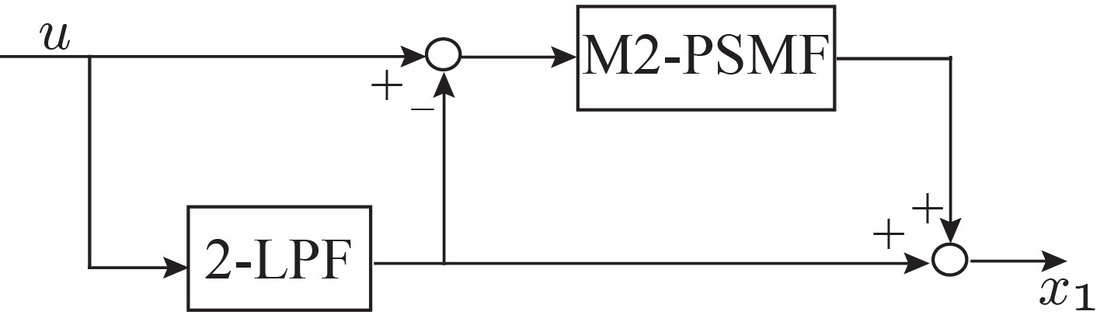
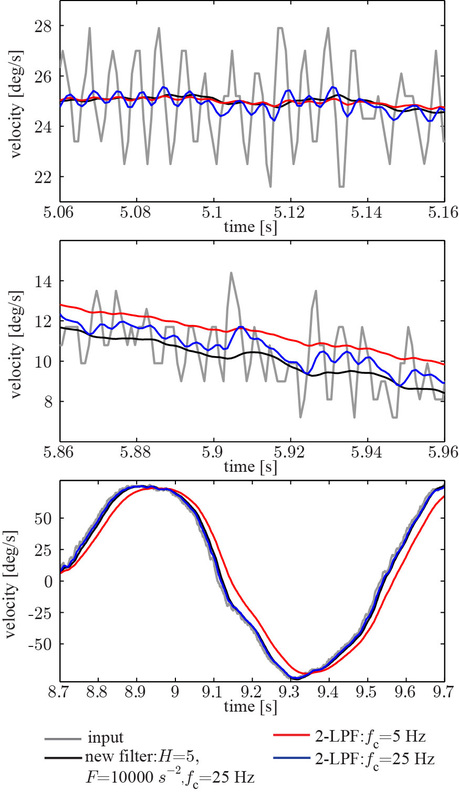

This research presents two contributions in the development of filters for removing high frequency noise. First, three variants of Jin et al.’s (2012) parabolic sliding mode filter (J-PSMF) are derived and their frequency-response characteristics are investigated. Second, a new filter was proposed by combining a second order low-pass filter and one of the variants of J-PSMF. The effectiveness of the proposed filter is validated by using a sample signal of angular velocity obtained with an optical encoder. In particular, it is suggested that the proposed filter has better balance between the noise attenuation and signal preservation than linear low-pass filters and J-PSMF.
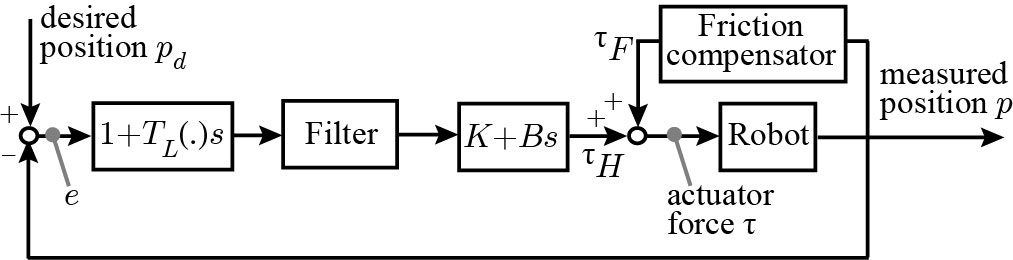
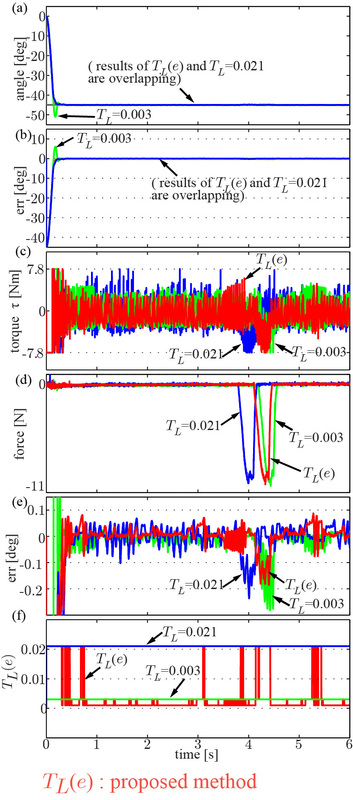
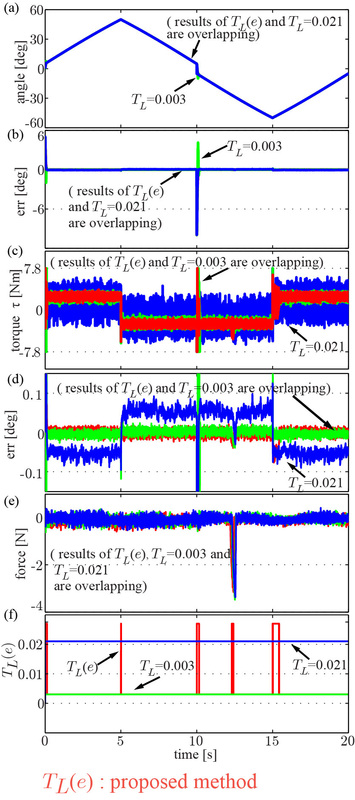
4. Friction Compensation in a Robotic Joint
The video is taken from the Youtube Channel of my advisor, Professor Ryo Kikuuwe [link]. The experimental setup in the movie belongs to Control Engineering Lab, Kyushu University, Japan.
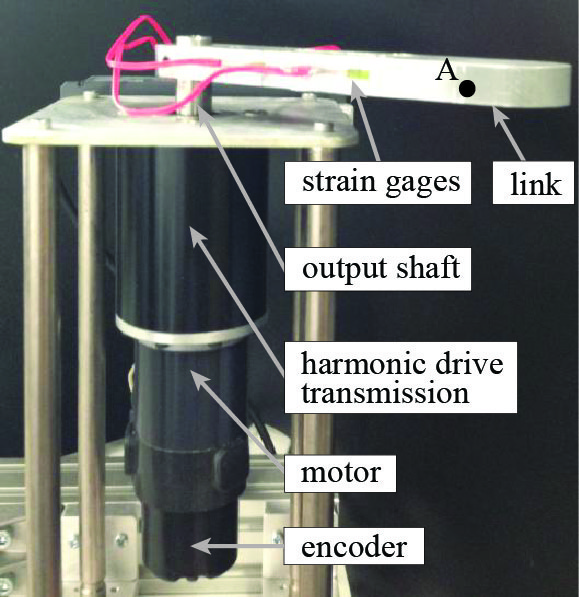
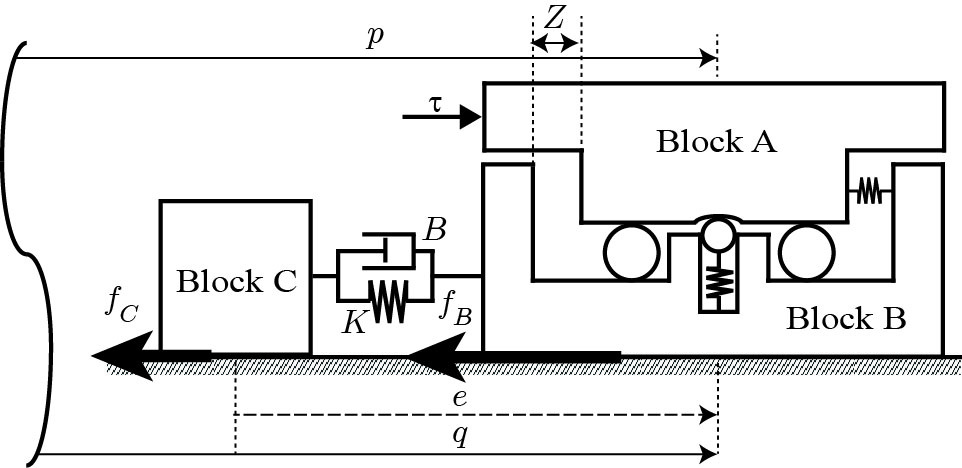


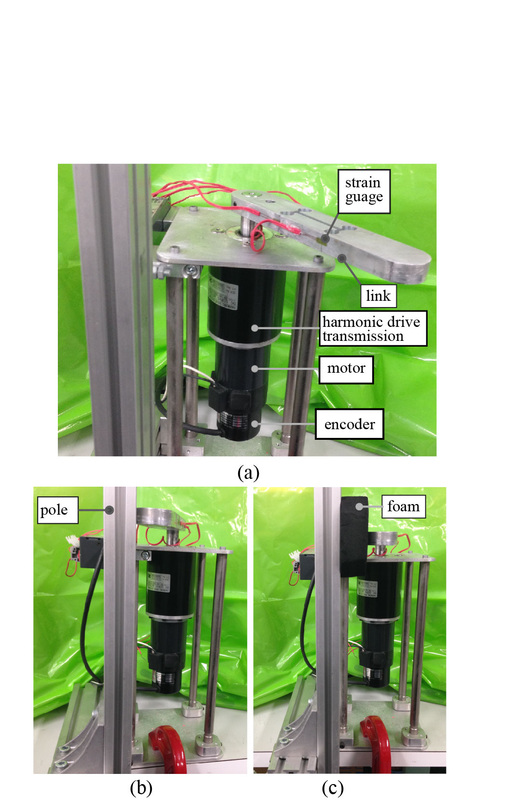
Most of existing friction compensation techniques are based on friction models that uses the velocity as its input. These methods are difficult to apply to inexpensive encoder-based actuator systems that do not exhibit sufficiently large presliding displacement. This research presents a new method of friction compensation that can be applied to geared actuators with high presliding stiffness. The compensator consists of three components that compensate: (a) static friction, (b) rate-dependent kinetic friction, and (c) dynamic friction involving presliding viscoelasticity. The first component employs dither-like torque command, and the other two are based on friction models involving precalibrated parameters. The proposed method is validated through experiments employing a harmonic drive transmission. In particular, it is suggested that the dither-like static friction compensation and the viscosity in the presliding model significantly improve the performance of the compensator.
